

Robík
Robot Robík je aktuálně největší a nejtěžší robot mého vozového parku. Za dobu své existence prošel několika zásadními úpravami a stále není dokončen, protože bohužel nemůžu robotické práci věnovat tolik času, kolik bych chtěl.
Koncepce
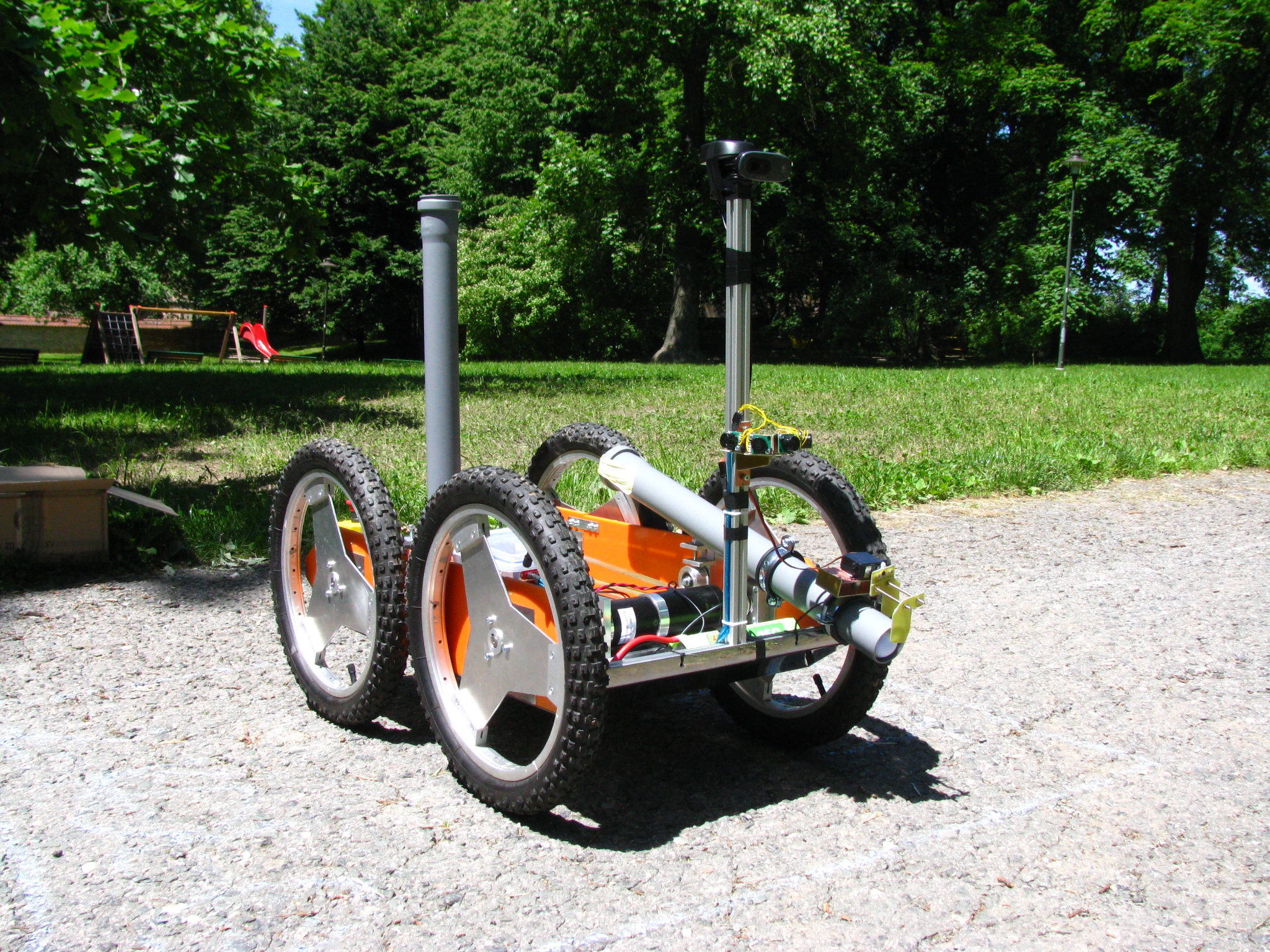
Čtyřkolové vozidlo, kola 16" z dětského jízdního kola - ispirace robotem Orpheus. Robot Orpheus ve své první verzi nebyl tolik "military" a Robík se mu podobal mnohem více. Poměrně neobvyklá je kombinace kolového podvozku se smykovým řízením jako u pásového vozidla. Je nutno poznamenat, že to není příliš dobrý nápad. Nicméně v současnosti je podvozek poměrně slušně použitelný a nemíním jej měnit, dokud nedojde k zásadní mechanické závadě (porucha motoru / převodovky).
Technický popis
Přibližné rozměry:
- délka 84 cm
- šířka 48 cm
- minimální výška 28 cm
- maximální výška 75 cm (stožár na magnetomer)
- světlost dna korby nad terénem 12 cm
- hmotnost 23 kg
Použité materiály:
- svařovaný rám z hliníkového jeklu
- frézovaná a soustružená mechanika pohonu dural / hliník
- dno korby 1.5 mm nerezový plech (zbytečně těžké)
- bočnice korby plast z radlice sněžného pluhu :-)
- plastový stožár pro externí magnetometr z 50 mm opadového potrubí
Pohon:
- diferenciální řízení
- dvojice kol spřažené ozubenými řemeny
- dva motory GMP 56-60107
- regulátor MD22
Napájení pohonu:
- 6x 5.1 Ah článek LiPol (22.2 V) v leteckomodelářském (měkkém) provedení
- nízká hmotnost, velký vybíjecí proud v případě potřeby, rozumné jízdní časy
Napájení řídící elektroniky:
- 3x 2.2 Ah článek LiPol (11.1 V) v leteckomodelářském (měkkém) provedení
- Napájení řídící elektroniky je oddělené od napájení silové části stroje
Řídící jednotka
CortexPilot doplněná o následující periferie:
- externí magnetometr
- GPS
- 5x sonar SRF02
- jednoduchý dvouosý gimbal pro polohování kamery
- pokladač glofových míčků z odpadové trubky 50 mm a jednoho standardního serva
- Bluetooth data link
- Externí OLED displej 128x64 bodů pro zobrazování základních stavových informací
Známé nedostatky a konstrukční chyby
- Diferenciálně řízený kolový podvozek se příliš nehodí pro outdoor robota,
především kvůli velkému odporu při zatáčení v trávě
- Ozubené řemeny občas přeskakují přes zuby i přes to, že jsou řádně napnuté
- Motory produkují poměrně silné magnetické pole,
což si vyžádalo umístění magnetometru do věže mimo korbu